一起物流装备提出了一种全功能原位替代的机场行李机器人智能集装系统,通过在现有行李转盘外挂增设智能化装载功能模块,并按照人工拣选工位部署机器人作业模块,实现机场行李装载的自动化和智能化。该解决方案不仅适用于新改扩建机场,同时也为已运行机场行李装载自动化和智能化升级提供了可能性。该系统的应用,可以降低机场行李装载的人工成本,提高行李装载效率和准确性,减少行李错装或漏装的情况,提高旅客满意度和机场效率。
关键词:机场行李、工业机器人、智能装载、行李分类识别
一、引言
机场离港旅客的行李在值机柜台办理托运,经安全检查后由行李处理系统输送到分拣装载区,通过人工分拣装载到行李拖车或航空集装箱,再运输到机坪装上航空器。人工分拣装载模式下,需由人工识别行李目的地、舱位信息、完成装筐行李的包筐分离,并在装载过程中调整行李姿态以提升行李拖车或航空集装箱的装载率。行李分拣装载工作由于其较高强度体力劳动的特性,正面临着从业人员工作意愿降低的挑战。从业人员在执行分拣装卸任务的过程中,其身体肌肉和骨骼承受着较高的损伤风险。此外,行李分拣装载过程中可能出现错装或漏装的情况,这不仅会降低旅客的满意度,也会给航空公司带来额外的赔偿成本。因此,近年来国内外机场已开始探索能有效替代人工的自动装载解决方案。
例如,荷兰阿姆斯特丹史基辅机场、英国希思罗机场已建成行李机器人自动装载设备并投用;澳大利亚悉尼、土耳其伊斯坦布尔、奥地利维也纳等机场也已在新改扩建时规划行李机器人自动装载系统;深圳宝安、广州白云、昆明长水等国内大型机场前期对行李机器人自动装载也进行了专题研究[1][2],合肥新桥、重庆江北、太原武宿等机场的新建行李处理系统已规划行李机器人自动装载系统应用。与此同时,国内外一些学者也开始对行李机器人算法、运动轨迹等开展专题研究[3][4]。
目前国内外已建成或规划的行李机器人自动装载系统主要面向的是新改扩建机场,在已投运的机场中,由于受空间限制,机器人自动装载系统的应用面临挑战。本研究提出了一种创新解决方案,即针对大多数机场采用行李转盘作为分拣装载资源的场景,在无需大量改造行李转盘的前提下,通过外挂增设全功能模块,实现行李装载的智能化和自动化。该方案能够在不影响机场正常运行的前提下,实现机器人在原有人工拣选位置上的全功能替代,为机场行李装载提供一种高效、实用的升级解决方案,提升运营效率。
二、全功能原位替代机器人智能集装概念设计
全功能原位替代机器人智能集装解决方案针对行李转盘(倾斜转盘或水平转盘)为集装资源的特征场景,外挂增设机器人智能集装相关功能模块,由机器人智能集装模块自主完成到达分拣装载区的行李识别、分类、位姿调整、包筐分离、自动缓存与智能堆码等全部功能,将1个人工分拣装载作业区域替换成1套机器人作业模块,实现人工分拣装载的全功能原位替代。
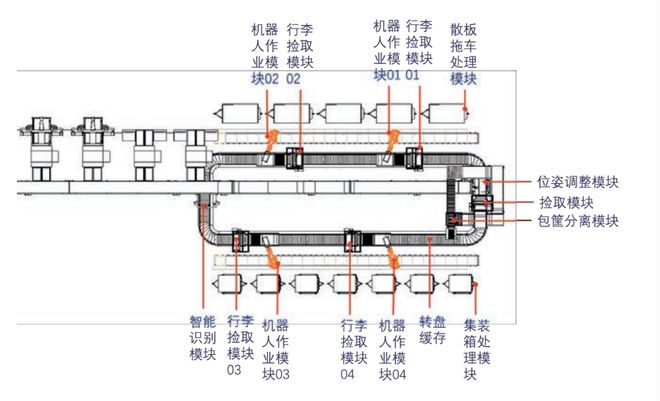
以单套装载转盘作为机器人智能集装单元规划,机器人作业模块基于拣装工位配置,其概念设计详见图1。
全功能原位替代的机场行李机器人智能集装系统
图1 行李系统全功能原位替代机器人概念设计
三、方案设计
1.系统组成与功能
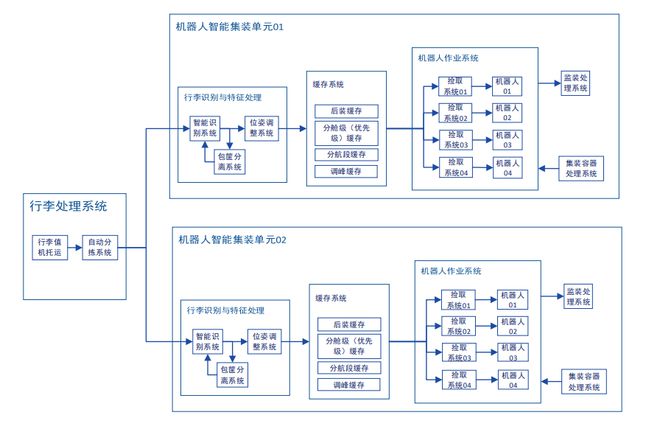
机器人智能集装单元包括智能识别模块、位姿调整模块、包筐分离模块、缓存模块、捡取模块、机器人作业模块、装载容器处理模块、监装处理模块、控制管理系统,其布局分布详见图2。
全功能原位替代的机场行李机器人智能集装系统
图2 行李系统机器人智能集装单元设计
(1)智能识别模块
智能识别模块配置ATR/RFID读取器、2D/3D检测相机,在汇集输送线注入口下游跨装在转盘环路上方,用于获取行李条码信息和行李信息;包括行李条码、航班、航段、舱级标记、是否装筐、拉杆是否伸出、是否直立、规格尺寸等信息的检测与识别。
(2)位姿调整模块
位姿调整模块由行李侧移输送、旋转输送、翻转放倒装置组成,安装在转盘环路上方,用于实现行李的位置和姿态适应性调整,确保行李位姿满足自动装载要求。侧移输送装置用于将偏置输送的行李水平侧移到输送线中心;旋转输送装置水平旋转行李,实现行李水平姿态调整(如将行李脚轮调整到特定方向);翻转放倒装置用于将直立/侧立行李垂直翻转后放倒输送。
(3)包筐分离模块
包筐分离模块由行李筐姿态调整、翻箱倒料、空筐自动堆码装置组成,安装在转盘环路上方,用于将装筐的行李从行李筐中倾翻分离,并将行李空筐自动堆码成垛。
(4)缓存模块
利用转盘作为机器人智能集装缓存系统,集成行李位置跟踪算法,实现不同舱级、不同航段、后装行李的缓存与待装行李循环输送;同时提供机器人作业模块与汇集输送系统间行李处理峰值消减调节。
(5)捡取模块
捡取模块由整幅面垂直分拣装置、排队缓存装置组成,跨装在转盘上方,用于实现将行李从转盘鳞板输送面垂直拣选到高层,排队等待进入机器人接取站。
(6)机器人作业模块
机器人作业模块由接取站、工业机器人、视觉系统组成,安装在转盘边的拣装作业区,用于将接取站的行李自动堆码到行李拖车或航空集装箱内。
(7)装载容器处理模块
装载容器处理模块由AGV系统实现行李拖车或航空集装箱拖车的侧移与运输。
(8)监装处理模块
系统工作站提供人工操作界面,实现超规行李和高舱位行李等特殊行李的补装行李信息录入,打印装箱清单。
2.系统作业
(1)行李识别:行李识别作业流程,详见图3中的流程①至流程③。行李经值机安检后,进入汇集输送系统①输送到装载转盘②;行李在转盘②上输送至智能识别系统③。智能识别系统③对行李检测识别,获取行李条码信息、航段信息等;利用分类算法对行李是否装筐、是否拉杆伸出、是否软包、优先标识等进行识别并分类,行李在转盘上输送过程中,控制系统通过位置跟踪技术获知行李在转盘上准确位置。
全功能原位替代的机场行李机器人智能集装系统
图3 行李系统机器人智能集装系统作业流程
(2)正常行李自动装载:正常行李自动装载流程,详见图3中的流程④至流程⑦。行李在转盘上输送到行李捡取模块④时,如果行李为机器人装载的行李,行李捡取模块将行李从转盘上垂直分拣提升到机器人接取站⑤;行李到达接取站⑤后,由视觉系统检测行李位姿,生成机器人接取指令;机器人⑥基于行李位姿,调整机器人夹具姿态接取行李,将行李搬运装载到装载容器⑦。
(3)特殊行李处理:特殊行李自动装载流程,详见图3中的流程⑧至流程.。如果行李是装筐行李、立姿输送行李、拉杆伸出等特征行李,行李在转盘上输送到行李捡取模块⑧,由行李捡取模块⑧将行李从转盘上垂直分拣提升到位姿调整系统⑨;如果仅需要调整位姿(立姿放倒),由位姿调整系统⑨调整行李位姿,通过回流输送线输送到注入输送⑩;如果是装筐行李,由包筐分离系统.抱夹行李筐后将行李倾翻到注入输送⑩;行李由注入输送⑩重新注入到行李捡取模块⑧,由行李捡取模块⑧下降到转盘输送。
3.系统性能
(1)装载率
机器人作业模块可装载的行李与汇集输送线输送到装载区的行李总量的比率。
目标装载率:100%。
(2)处理能力
高峰时段行李连续到达装载作业区,机器人每小时可装载行李数量。
目标处理能力:不低于180件/小时。
(3)满载率
用于航空集装箱装载时,机器人智能集装行李体积与人工装载行李体积比。
目标满载率:不低于80%。
(4)最小占地面积
外挂实施机器人智能集装系统,无需因占地面积引发对原有转盘和汇集输送线的拆改。
四、验证测试
在福州长乐国际机场航站楼国际行李处理分拣区搭建一套实物验证系统,旨在对基于全功能原位替代机器人智能集装系统的关键功能和性能进行验证测试。
1.生产环境实物验证方案说明

全功能原位替代的机场行李机器人智能集装系统
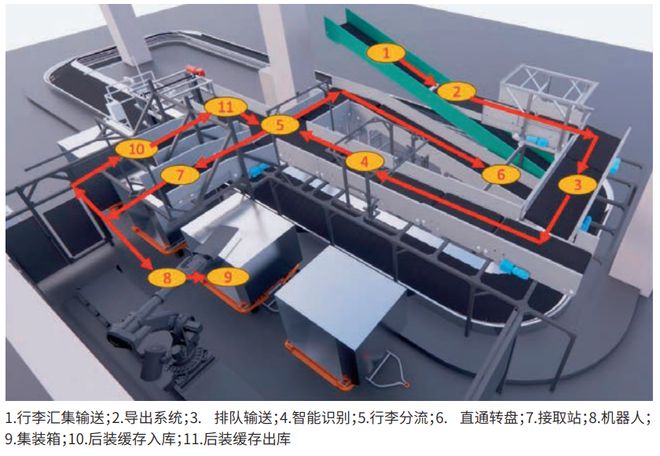
图4 行李系统机器人智能集装系统生产环境方案设计流程
福州机场行李系统机器人智能集装系统生产环境方案设计详见图4,机器人智能集装系统采用外挂实施方式,在原行李汇集输送线①输送面搭接导出输送装置②,将行李从原行李处理系统导出分流到布置在转盘上方的排队输送线③,实现行李从原行李系统导出,现场实景详见图5。
全功能原位替代的机场行李机器人智能集装系统
图5 福州机场行李导出段现场实景
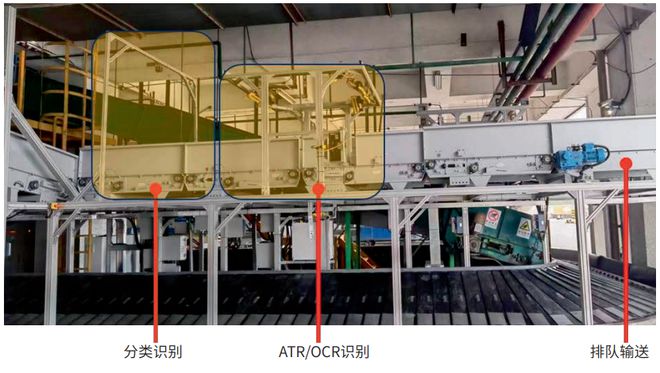
行李排队输送系统③实现拉距处理,避免行李粘连、并包输送。行李经排队输送系统③后,进入智能识别站④,对行李检测识别,获取行李条码信息、航段信息等;利用分类算法对行李是否装筐、是否拉杆伸出、是否软包、优先标识等进行识别并分类,现场实景详见图6。

全功能原位替代的机场行李机器人智能集装系统
图6 福州机场行李分类识别现场实景
行李到达分流节点⑤,基于智能识别结果,不由机器人装载的行李(如麻袋、拉杆伸出、装筐、立姿输送等行李)分流输送到直通转盘输送线⑥;由机器人装载的行李输送到机器人接取站⑦。
行李到达机器人接取站⑦后,由视觉系统检测行李位姿,生成机器人接取指令。机器人⑧基于行李位姿,调整接取夹具姿态接取行李。如果是可直接装载到装载容器的行李,由机器人⑧将行李搬运装载到装载容器⑨,现场实景详见图7。
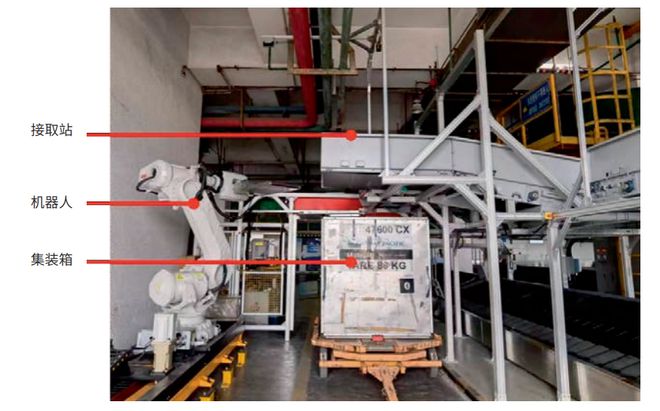
全功能原位替代的机场行李机器人智能集装系统
图7 福州机场行李机器人抓取装置现场实景
如果是轻小软等需后装的行李,由机器人⑧将行李搬运释放到后装缓存输送线入口⑩;当需要装载轻小软行李时,轻小软行李从后装缓存出口.释放,汇流到行李分流点⑤后,再次输送到行李接取站⑦,由机器人⑧接取后装载到装载容器⑨。
2.实物验证结论
经实物验证,系统将行李从原有行李处理系统全部导出输送到机器人智能集装系统,机器人智能集装系统完成ATR读取、OCR识别、视觉分类识别功能,可实现将指定航班中特定航段行李自动分流到机器人智能集装区,由机器人智能集装到AKE集装箱;不由机器人智能集装的行李分流输送到转盘交由人工处理。实测可实现180件/小时处理能力,满载率可达到80%。
五、技术经济性评价
1.原位替代的经济评价模型
技术经济评价,参照机电工程经济评估办法。
按照传统全人工装卸模式,转盘分拣作业区可分为多个拣装区,每个拣装区作为一个拣装工位分配1名拣装人员;行李装载作业量大的机场,拣装人员每天早晚2班倒,拣装人员上2天休2天,单个拣装工位需要配置4名拣装人员。
全功能原位替代机器人智能集装系统中,1个拣装工位配置1台机器人,因此技术经济评价体现为机器人经济使用寿命期内, 1台机器人与4名工人的财务对比。
2.经济评价结论
基于每名工人每年全费用(工资、保险、培训、劳保等)9万元、年费用增长率5%,4名人员15年(机器人经济使用寿命期)全费用为776.8万元;1套机器人装载系统15年全费用约275万元(基于全功能实现,含能源、维修备件等);基于上述费用对比,实施机器人智能集装财务投资回收期约6年,合理的机器人装载系统规划实施将带来明显的经济效益。
3.经济评价的适用性
上述经济评价适用于机场装载行李量大,机场拣装人员采用每天2班倒、上2天休2天的排班模式;机场装载作业量小,拣装作业人员任务不饱满,未按每拣位配置4名拣装人员的情况不适用上述经济评价。
六、总结
本文提出了一种基于全功能原位替代的机场行李智能装载系统,既适用于新改扩建机场行李处理系统,也适用于已运行机场行李装载智能化升级。该系统通过在行李装载转盘外挂加装机器人智能集装装置,原位全功能替代拣装人员,通过减少拣装人员数量实现经济效益。通过在福州机场进行的实物验证,证明所提系统的相关功能、性能以及经济性指标均已达到行业应用的要求。因此,该系统具备在机场环境中推广应用的潜力,为机场行李装载提供了一种高效、经济的解决方案。
冷链物流 http://www.17356.com/11778.html,供应链物流[联雄冷链]一站式冷链物流/冷链运输/冷链配送网络;智慧冷链物流服务商联雄供应链旗下冷链供应链[冷冻链]冷链物流运输配送平台17356冷链物流网Cold chain Logistics Network冷链物流网络版权所有,如果你转载冷链物流17356网站文章,请保留链接和版权信息。







评论0